Project 30 infrared remote control Smart Home

Description
Smart home adopts artificial intelligence technology to provide people with a more comfortable, convenient and safe living experience. It covers many aspects from lighting, security, home appliance control to environmental monitoring, so we can manage and control the home environment through intelligent devices and systems.
In this project, we create a smart home system by the Keyestudio development board, infrared remote control module, relay and stepper motor. You can control various household appliances, such as lights, fans and curtains, with an infrared remote control.
Hardware
1. 328 Plus development board x1
2. IR receiver x1
3. Relay module x1
4. Stepper motor x1
5. Stepper motor driver x1
6. IR remote control x1
7. LED x1
8. 100NF capacitor x1
9. 10μF capacitor x1
10. 220Ω resistor x1
11. DuPont wires x1
12. Jumper wires
13. Breadboard x1
Working Principle
When you press the button on the remote control, the infrared receiver receives the corresponding infrared signals. These signals will be decoded to trigger corresponding actions. For example, press the “Light” button to turn on or off the connected light via the relay; press the “Curtain” button to open or close the curtain through stepper motor.

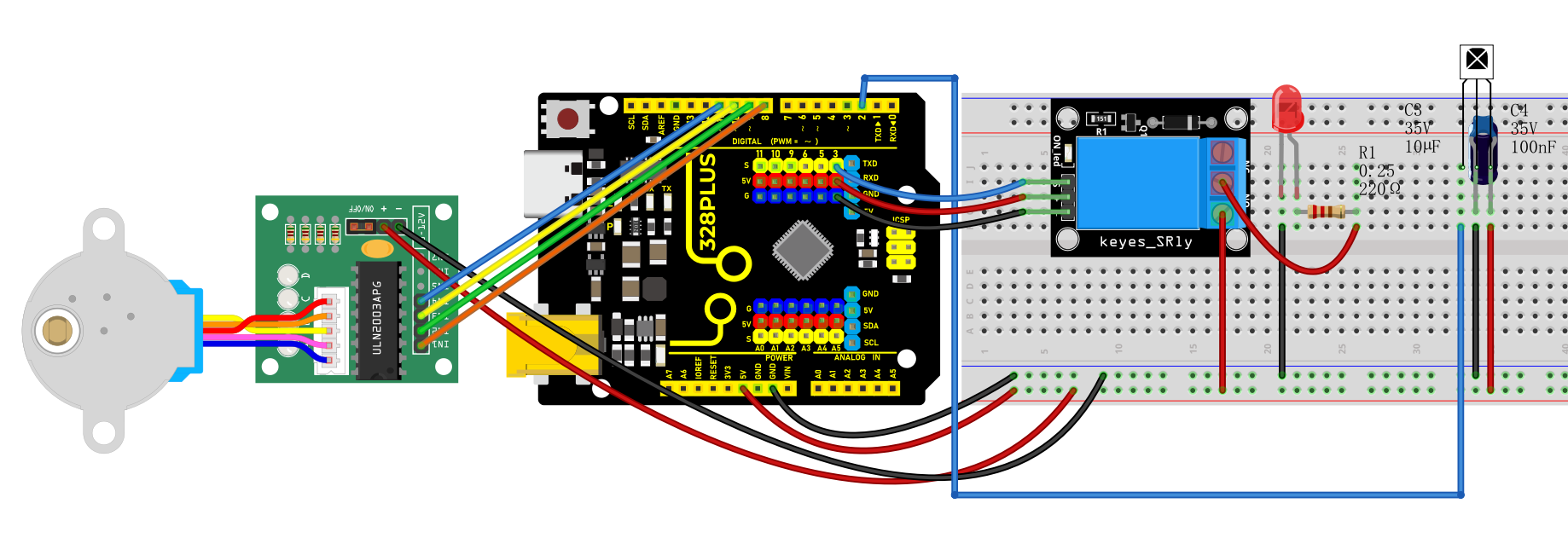
Wiring Diagram
Connect digital pin D8, D9, D10, D11 on the board to pins IN1, IN2, IN3, IN4 of the stepper motor via DuPont wires.
Connect pin S of the relay to digital pin D3 on the board.
Connect LED pins to the normally-open contacts and common contacts of the relay.
Connect OUT pin of IR receiver to the digital pin D2 on the board.
Sample Code
/*
Keye New RFID Starter Kit
Project 30
infrared remote Smart Home
Edit By Keyes
*/
#include <IRremote.h>
#include <Stepper.h>
#define IR_RECEIVE_PIN 2
#define RELAY_PIN 3
#define STEPS_PER_REV 2048
IRrecv irrecv(IR_RECEIVE_PIN);
decode_results results;
Stepper stepper(STEPS_PER_REV, 8, 10, 9, 11);
void setup() {
irrecv.enableIRIn(); // initialize ir receiver
pinMode(RELAY_PIN, OUTPUT); // set relay pin to output
stepper.setSpeed(10); // set the stepper motor speed
}
void loop() {
if (irrecv.decode(&results)) {
switch (results.value) {
case 0xFF6897: // light button
digitalWrite(RELAY_PIN, !digitalRead(RELAY_PIN)); // change the relay state
break;
case 0xFF9867: // open curtain button
stepper.step(STEPS_PER_REV); // stepper motor rotates to open the curtain
break;
case 0xFFB04F: // close curtain button
stepper.step(-STEPS_PER_REV); // stepper motor reverses to close the curtain
break;
}
irrecv.resume(); // receive next ir receiver
}
}
Code Explanation
The code includes references to two libraries:
#include <IRremote.h>
#include <Stepper.h>
The IRremote.h library is used to implement functionality related to infrared remote control, enabling the Arduino to receive and decode signals from an infrared remote. The Stepper.h library is used to control a stepper motor, allowing it to rotate with precise angles, which is very useful in automated control systems, such as automatic curtain control.
Next, the code defines some constants and objects:
#define IR_RECEIVE_PIN 2
#define RELAY_PIN 3
#define STEPS_PER_REV 2048
IRrecv irrecv(IR_RECEIVE_PIN);
decode_results results;
Stepper stepper(STEPS_PER_REV, 8, 10, 9, 11);
IR_RECEIVE_PIN defines the pin number (pin 2) where the infrared receiver is connected to the Arduino.
RELAY_PIN defines the pin number (pin 3) where the relay is connected.
STEPS_PER_REV represents the number of steps required for the stepper motor to complete one full revolution (2048 steps).
An IRrecv object is created to handle the reception of infrared signals, and a decode_results object is used to store the decoded results. The Stepper object is configured with the parameters of the stepper motor, including the number of steps per revolution and the four pins used to control the motor.
In the setup() function, some basic initialization settings are made:
void setup() {
irrecv.enableIRIn(); // Initialize the infrared receiver
pinMode(RELAY_PIN, OUTPUT); // Set the relay pin as an output
stepper.setSpeed(10); // Set the speed of the stepper motor
}
Here, irrecv.enableIRIn() starts the infrared receiver module, pinMode(RELAY_PIN, OUTPUT) sets the relay pin as an output, and stepper.setSpeed(10) sets the rotation speed of the stepper motor.
The loop() function is the core of the code. It continuously checks if an infrared signal has been received and performs corresponding actions based on the different signals:
void loop() {
if (irrecv.decode(&results)) {
switch (results.value) {
case 0xFF6897: // "Turn on light" button
digitalWrite(RELAY_PIN, !digitalRead(RELAY_PIN)); // Toggle the relay state
break;
case 0xFF9867: // "Open curtain" button
stepper.step(STEPS_PER_REV); // Rotate the stepper motor to open the curtain
break;
case 0xFFB04F: // "Close curtain" button
stepper.step(-STEPS_PER_REV); // Rotate the stepper motor in reverse to close the curtain
break;
}
irrecv.resume(); // Continue receiving the next infrared signal
}
}
In this code, irrecv.decode(&results) checks if an infrared signal has been received and decodes it. The decoded results are stored in the results object. Depending on the different signal values, actions such as toggling the relay or controlling the rotation of the stepper motor are executed. After each operation, irrecv.resume() is called to prepare for receiving the next signal.
Project Result
With this smart home system, you can easily control lights and curtains (stepper motor) using an infrared remote. Based on the remote key codes read from previous projects, pressing the “1” key on the remote will toggle the lights on or off. Pressing the “2” key will automatically open the curtains (stepper motor rotates forward), and pressing the “3” key will automatically close the curtains (stepper motor rotates backward). This simple and intuitive method makes it more convenient to manage your home devices, enhancing your living comfort.