Project 26 Smart Bin

Description
Smart bin not only has the basic functions of traditional garbage cans, but also integrates a variety of intelligent technologies, which brings a lot of convenience to our lives.
In this project, we make a smart bin by 328 Plus development board, ultrasonic sensor and servo. When someone is near the bin, the lid will automatically open; When people leave, the lid automatically closes
Hardware
328 Plus development board x1
HC-SR04 ultrasonic sensor x1
SG90 servo x1
DuPont wires
Jumper wires
Working Principle
The HC-SR04 ultrasonic sensor calculates the distance from the object by transmitting and receiving ultrasonic waves. When a person is detected, the servo controls the lid to open. When the person leaves, the lid closes.

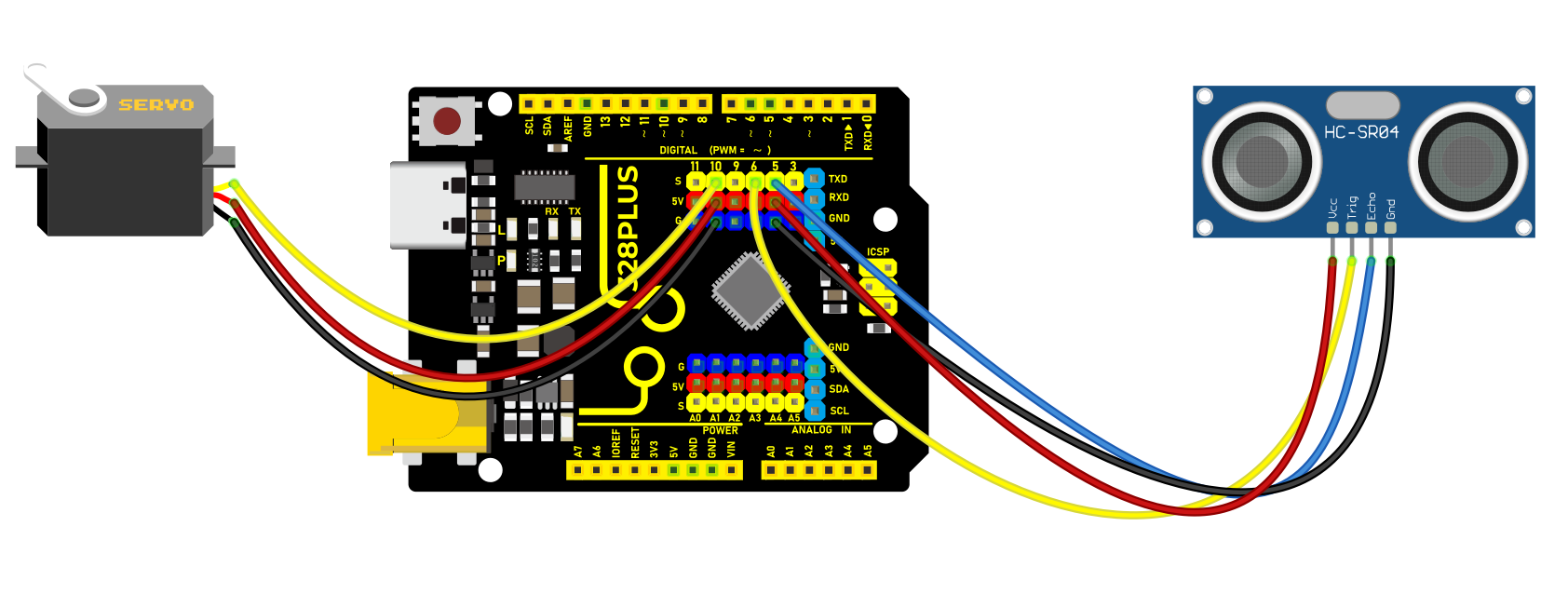
Wiring Diagram
Connect HC-SR04 Trig pin to digital pin D6, Echo pin to digital pin D5.
Connect the yellow wire(signal) of servo to digital pin D10 on the board.
Sample Code
/*
Keye New RFID Starter Kit
Project 26
Smart Bin
Edited By Keyes
*/
#include <Servo.h>
const int trigPin = 6; // Ultrasonic sensor Trig pin
const int echoPin = 5; // Ultrasonic sensor Echo pin
const int servoPin = 10; // Servo motor pin
Servo myservo; // Create a servo object
void setup() {
pinMode(trigPin, OUTPUT); // Set Trig pin as output
pinMode(echoPin, INPUT); // Set Echo pin as input
myservo.attach(servoPin); // Attach servo motor to pin 10
myservo.write(0); // Initialize servo to 0 degrees
Serial.begin(9600); // Initialize serial communication with a baud rate of 9600
}
void loop() {
long duration, distance;
// Send a 10-microsecond high pulse to trigger the ultrasonic sensor
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the high pulse duration from the Echo pin
duration = pulseIn(echoPin, HIGH);
// Calculate distance (in centimeters)
distance = duration * 0.034 / 2;
// Print the distance value to the serial monitor
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
if (distance < 20) { // If the distance is less than 20 cm, open the lid
myservo.write(180);
delay(3000); // Keep it open for 3 seconds
} else { // If the distance is greater than 20 cm, close the lid
myservo.write(0);
}
delay(100); // Delay for 100 milliseconds
}
Code Explanation
Library File Inclusion:
#include <Servo.h>
This includes the Arduino Servo library, which is used to control the servo motor.
Pin Definitions and Object Creation:
const int trigPin = 6; // Trig pin for the ultrasonic sensor
const int echoPin = 5; // Echo pin for the ultrasonic sensor
const int servoPin = 10; // Pin for the servo motor
Servo myservo; // Create a servo motor object
Defines the Trig and Echo pins for the ultrasonic sensor and the pin for the servo motor connection. It also creates a servo object for later control.
Initialization Setup:
void setup() {
pinMode(trigPin, OUTPUT); // Set the Trig pin as an output
pinMode(echoPin, INPUT); // Set the Echo pin as an input
myservo.attach(servoPin); // Attach the servo to digital pin 10
myservo.write(0); // Set initial servo position to 0 degrees (closed position)
Serial.begin(9600); // Initialize serial communication at 9600 baud rate
}
Sets the pin modes for the ultrasonic sensor, connects the servo, and initializes its position. Serial communication is also started for debugging and monitoring sensor data.
Main Loop Function:
void loop() {
// ... (continued as above)
}
In the main loop, the ultrasonic sensor data is continuously read, and the servo’s action is controlled based on distance.
Ultrasonic Sensor Trigger and Read:
// Send a 10-microsecond high pulse to trigger the ultrasonic sensor
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the high duration on the Echo pin
duration = pulseIn(echoPin, HIGH);
Sends a specific pulse signal to trigger the ultrasonic sensor, then uses the pulseIn function to measure the duration of the high signal on the Echo pin.
Distance Calculation:
// Calculate distance (in centimeters)
distance = duration * 0.034 / 2;
Calculates the distance from the sensor to an object based on the principle of ultrasonic sensors. Sound travels in air at approximately 340 meters per second, or 0.034 centimeters per microsecond. Because the sound has to travel to and from the object, the result is divided by two.
Serial Distance Output:
// Print the distance to the serial monitor
Serial.print("Detected Distance: ");
Serial.print(distance);
Serial.println(" cm");
Outputs the calculated distance to the serial monitor, which can be viewed in the Arduino IDE.
Servo Motor Control:
if (distance < 20) { // If the distance is less than 20 cm, open the trash bin lid
myservo.write(180); // Rotate the servo to 180 degrees (open position)
delay(3000); // Keep it open for 3 seconds
} else { // If the distance is 20 cm or greater, close the trash bin lid
myservo.write(0); // Rotate the servo to 0 degrees (closed position)
}
Determines if someone is nearby based on distance. If the detected distance is less than 20 centimeters, it assumes someone is approaching and opens the trash bin lid, holding it open for 3 seconds; otherwise, the servo maintains a closed position.
Loop Delay:
delay(100); // Delay for 100 milliseconds to control loop frequency
Delays the loop by 100 milliseconds to prevent the loop from running too quickly and consuming excessive resources.
Project Result
When someone is near the bin (less than 20 cm away), the lid will automatically open for 3 seconds.
When people leave (the distance is greater than or equal to 20 cm), the lid automatically closes to keep the environment clean.